Variational Autoencoders
- Variational autoencoders (VAEs) are probabilisitic generative models.
- They aim to learn a distribution \(p(x)\) over the data.
- After training, it is possible to draw (generate) samples from this distribution.
- Unfortunately, it is not possible to compute the log-likelihood of a sample \(x^*\) exactly.
- It is possible to define a lower bound on the likelihood.
- The VAE approximates this bound using a Monte Carlo sampling approach.
Image credits: Understanding Deep Learning by Simon J. D. Prince, [CC BY 4.0] and
An Introduction to Variational Autoencoders by Kingma, D. P. and Welling, M.
Credits: Introduction to Flow Matching and Diffusion Models by Peter Holderrieth
Image credits: Understanding Deep Learning by Simon J. D. Prince, [CC BY 4.0]
Linear latent variable models
- LVMs model a joint distribution \(p(\bm{x}, \bm{z})\) of the data \(\bm{x}\) and a latent variable \(\bm{z}\).
- They then describe \(p(\bm{x})\) as the marginal distribution of the joint distribution: \[ p(\bm{x}) = \int p(\bm{x}, \bm{z}) d\bm{z} = \int p(\bm{x} | \bm{z}) p(\bm{z}) d\bm{z}. \]
- This is a rather indirect approach to describint \(p(\bm{x})\).
- Useful because expressions for \(p(\bm{x} | \bm{z})\) and \(p(\bm{z})\) are often much simpler than that for \(p(\bm{x})\).
- Let’s take a \(1\)D mixture of Gaussians
- \(z\) is discrete: \(p(z)\) is a categorical distribution with probability \(\lambda_n\) for every possible value of \(z\).
- The likelihood \(p(x \mid z = n)\) of the data is normally distributed with mean \(\mu_n\) and variance \(\sigma_n^2\). \[ \begin{aligned} p(z = n) &= \lambda_n \\ p(x \mid z = n) &= \mathcal{N}(x \mid \mu_n, \sigma_n^2). \end{aligned} \]
- The data likelihood is given by marginalizing over the latent variable \(z\) \[ p(x) = \sum_{n=1}^N p(x, z=n) = \sum_{n=1}^N p(x \mid z=n) p(z=n) = \sum_{n=1}^N \lambda_n \mathcal{N}(x \mid \mu_n, \sigma_n^2). \]
- Note that the likelihood and prior are both simple expressions, but the resulting data likelihood is multimodal!

a) The MoG describes a complex probability distribution (cyan curve) as a weighted sum of Gaussian components (dashed curves).
b) This sum is the marginalization of the joint density \(p(x, z)\) between the continuous observed data \(x\) and a discrete latent variable \(z\).
Nonlinear latent variable models
In a nonlinear latent variable model, both the data \(\bm{x}\) and the latent variable \(\bm{z}\) are continuous and multivariate.
- Both the prior \(p(\bm{z})\) and the likelihood \(p(\bm{x} \mid \bm{z})\) are normally distributed.
- \(p(\bm{z}) = \mathcal{N}(\bm{z} \mid \bm{0}, \bm{I})\)
- \(p(\bm{x} \mid \bm{z}, \bm{\theta}) = \mathcal{N}(\bm{x} \mid \mu(\bm{z}), \Sigma(\bm{z}))\)
- Say, the likelihood is modeling a continuous variable: the mean and covariance are given by neural networks
- Many times the covariance is fixed and assumed to be diagonal: \(\Sigma(\bm{z}) = \sigma^2 \bm{I}\) (\(\sigma\) can be learned, too)
- The mean is given by a neural network: \(\mu(\bm{z}) = f(\bm{z}; \bm{\theta})\)
- The latent variable \(\bm{z}\) is lower dimensional than the data \(\bm{x}\).
- In this example, the data probability \(p(\bm{x} \mid \bm{\theta})\) is found by marginalizing over the latent variable \(\bm{z}\) \[ p(\bm{x} \mid \bm{\theta}) = \int p(\bm{x} \mid \bm{z}, \bm{\theta}) p(\bm{z}) d\bm{z} = \int \mathcal{N}\left(\bm{x} \mid f(\bm{z}; \bm{\theta}), \sigma^2 \bm{I}\right) \mathcal{N}(\bm{z} \mid \bm{0}, \bm{I}) d\bm{z} \]

- This can be viewed as an infinite weighted sum (i.e., an infinite mixture)
- Mixture is of spherical Gaussians with different means
- The weights are \(p(\bm{z})\) and the means are \(f(\bm{z}; \bm{\theta})\)
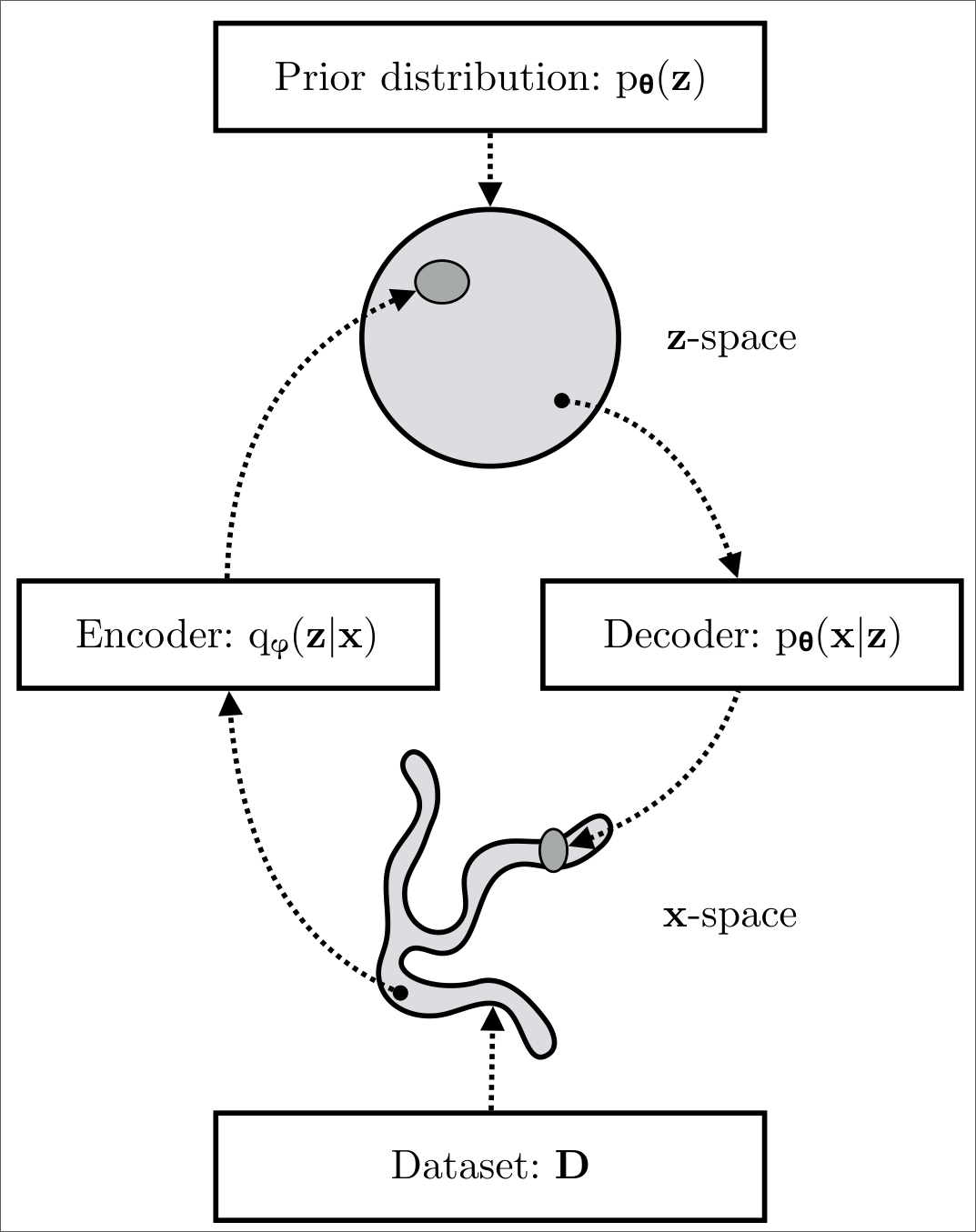
Generation
A new example \(\bm{x}^*\) is generated by ancestral sampling.
- Draw \(\bm{z}^* \sim p(\bm{z})\)
- Draw \(\bm{x}^* \sim p(\bm{x} \mid \bm{z}^*)\)
- Pass \(\bm{z}^*\) through the decoder network \(f(\bm{z}^*; \bm{\theta})\) to compute the mean of \(p(\bm{x} \mid \bm{z}^*)\)
- Draw \(\bm{x}^*\) from \(\mathcal{N}(\bm{x}^* \mid f(\bm{z}^*; \bm{\theta}), \sigma^2 \bm{I})\)

Training
- We want to maximize the log-likelihood over a training dataset \(\{ \bm{x}_i \}_{i=1}^I\) with respect to \(\bm{\theta}\) \[ \bm{\theta}^* = \arg\max_{\bm{\theta}} \sum_{i=1}^I \log p(\bm{x}_i \mid \bm{\theta}) = \argmax_{\bm{\theta}} \sum_{i=1}^I \log \int p(\bm{x}_i \mid \bm{z}, \bm{\theta}) p(\bm{z}) d\bm{z}, \tag{1}\] where for the Gaussian likelihood example, we would have \[ p(\bm{x}_i \mid \bm{\theta}) = \int \mathcal{N}\left(\bm{x}_i \mid f(\bm{z}; \bm{\theta}), \sigma^2 \bm{I}\right) \mathcal{N}(\bm{z} \mid \bm{0}, \bm{I}) d\bm{z}. \]
- Unfortunately, this is intractable to compute directly.
- No closed-form expression for the integral
- No easy way to evaluate it for a particular value of \(\bm{x}\)
- To make progress, we define a lower bound on the log-likelihood.
- Always less than or equal to the log-likelihood for a given value of \(\bm{\theta}\)
- Depends on some other parameters \(\bm{\phi}\)
- We will build a network to compute this lower bound and optimize it.
A concave function \(g(\cdot)\) of the expectation of data \(y\) is greater than or equal to the expectation of the function of the data: \[ g\left(\mathbb{E}[y]\right) \geq \mathbb{E}[g(y)]. \]
Using Jensen’s equality with \(g = \log\), we obtain \[ \log \E(y) = \log \int p(y)y dy \geq \int p(y) \log{(y)} dy = \E \log{y}. \]
In fact, the slightly more general statement is true: \[ \log \int p(y)h(y)dy \geq \int p(y) \log{(h(y))}dy, \] for some function \(h(y)\) of \(y\).
The intractability of \(p(\bm{x} \mid \theta)\) is related to the intractability of the posterior distribution \(p(\bm{z} \mid \bm{x}, \bm{\theta})\).
- Note that the joint distribution \(p(\bm{x}, \bm{z} \mid \theta)\) is efficient to compute and we have \[ p(\bm{z} \mid \bm{x}, \bm{\theta}) = \frac{p(\bm{x}, \bm{z} \mid \bm{\theta})}{p(\bm{x} \mid \bm{\theta})} \]
- Since \(p(\bm{x}, \bm{z} \mid \bm{\theta})\) is tractable to compute, a tractable marginal likelihood \(p(\bm{x} \mid \bm{\theta})\) leads to a tractable posterior \(p(\bm{z} \mid \bm{x}, \bm{\theta})\), and vice versa. Both are intractable!

Let us introduce a parametric inference model \(q(\bm{z} \mid \bm{x}, \bm{\phi})\).
- Also called an encoder or recognition model.
- With \(\bm{\phi}\), we indicate the variational parameters.
- We optimize the variational parameters \(\bm{\phi}\) such that \[ q(\bm{z} \mid \bm{x}, \bm{\phi}) \approx p(\bm{z} \mid \bm{x}, \bm{\theta}). \]
For any choice of inference model \(q(\bm{z} \mid \bm{x}, \bm{\phi})\), including the choice of variational parameters \(\bm{\phi}\), we have \[ \begin{aligned} \log p(\bm{x} \mid \bm{\theta}) &= \E_{q(\bm{z} \mid \bm{x}, \bm{\phi})}[\log p(\bm{x} \mid \bm{\theta})] \\ &= \E_{q(\bm{z} \mid \bm{x}, \bm{\phi})}\left[ \log \left( \frac{p(\bm{x}, \bm{z} \mid \bm{\theta})}{p(\bm{z} \mid \bm{x}, \bm{\theta})} \right) \right] \\ &= \E_{q(\bm{z} \mid \bm{x}, \bm{\phi})}\left[ \log \left( \frac{p(\bm{x}, \bm{z} \mid \bm{\theta})}{q(\bm{z} \mid \bm{x}, \bm{\phi})} \frac{q(\bm{z} \mid \bm{x}, \bm{\phi})}{p(\bm{z} \mid \bm{x}, \bm{\theta})} \right) \right] \\ &= \underbrace{\E_{q(\bm{z} \mid \bm{x}, \bm{\phi})}\left[ \log \left( \frac{p(\bm{x}, \bm{z} \mid \bm{\theta})}{q(\bm{z} \mid \bm{x}, \bm{\phi})} \right) \right]}_{=\mc{L}_{\theta, \phi}(x) \\[1pt] \text{(ELBO)}} + \underbrace{\E_{q(\bm{z} \mid \bm{x}, \bm{\phi})}\left[ \log \left( \frac{q(\bm{z} \mid \bm{x}, \bm{\phi})}{p(\bm{z} \mid \bm{x}, \bm{\theta})} \right) \right]}_{=D_{\text{KL}}(q(\bm{z} \mid \bm{x}, \bm{\phi})\;\Vert\; p(\bm{z} \mid \bm{x}, \bm{\theta}))} \end{aligned} \tag{2}\]
The second term is the Kullback-Leibler (KL) divergence which is nonnegative: \[ D_{\text{KL}}(q(\bm{z} \mid \bm{x}, \bm{\phi})\;\Vert\; p(\bm{z} \mid \bm{x}, \bm{\theta})) \geq 0 \] and zero if and only if \(q(\bm{z} \mid \bm{x}, \bm{\phi}) = p(\bm{z} \mid \bm{x}, \bm{\theta})\).
The first term is the variational lower bound, also called the evidence lower bound (ELBO): \[ \mc{L}_{\theta, \phi}(x) = \E_{q_\phi(\bm{z} \mid \bm{x})} \left[ \log p_\theta(\bm{x}, \bm{z}) - \log q_\phi(\bm{z} \mid \bm{x}) \right] \tag{3}\]
Due to the nonnegativity of the KL divergence, the ELBO is a lower bound on the log-likelihood of the data: \[ \mc{L}_{\theta, \phi}(\bm{x}) = \log p_\theta(\bm{x}) - D_{\text{KL}}\left(q_\phi(\bm{z} \mid \bm{x})\,\Vert\,p_\theta(\bm{z} \mid \bm{x})\right) \leq \log p_\theta(\bm{x}). \tag{4}\]
Hence, the KL divergence \(D_{\text{KL}}\left(q_\phi(\bm{z} \mid \bm{x})\,\Vert\,p_\theta(\bm{z} \mid \bm{x})\right)\) determines two “distances”:
- By definition, the KL divergence of the approximate posterior from the true posterior.
- The gap between the ELBO \(\mc{L}_{\theta, \phi}(\bm{x})\) and the marginal likelihood \(\log p_\theta(\bm{x})\).
- The latter is also called the tightness of the bound.
- The better \(q_\phi(\bm{z} \mid \bm{x})\) approximates the true (posterior) distribution \(p_\theta(\bm{z} \mid \bm{x})\), in terms of the KL divergence, the smaller the gap.

By looking at Equation 4, it can be understood that maximization of the ELBO \(\mc{L}_{\theta, \phi}(x)\) with respect to \(\bm{\theta}\) and \(\bm{\phi}\), will concurrently optimize the two things we care about:
- It will approximately maximize the marginal likelihood \(p_\theta(\bm{x})\). This means that our generative model or decoder will become better.
- It will minimize the KL divergence of the approximation \(q_\phi(\bm{z} \mid \bm{x})\) from the true posterior \(p_\theta(\bm{z} \mid \bm{x})\), so \(q_\phi(\bm{z} \mid \bm{x})\) becomes better.
We can also see that the ELBO is a lower bound on the log-likelihood by using Jensen’s inequality. \[ \begin{aligned} \log p(\bm{x} \mid \bm{\theta}) &= \log \int p(\bm{x}, \bm{z} \mid \bm{\theta}) d\bm{z} = \log \int p(\bm{x}, \bm{z} \mid \bm{\theta}) \frac{q(\bm{z} \mid \bm{x}, \bm{\phi})}{q(\bm{z} \mid \bm{x}, \bm{\phi})} d\bm{z} = \log \E_{q(\bm{z} \mid \bm{x}, \bm{\phi})} \left[ \frac{p(\bm{x}, \bm{z} \mid \bm{\theta})}{q(\bm{z} \mid \bm{x}, \bm{\phi})} \right] \\ &\geq \E_{q(\bm{z} \mid \bm{x}, \bm{\phi})} \left[ \log \frac{p(\bm{x}, \bm{z} \mid \bm{\theta})}{q(\bm{z} \mid \bm{x}, \bm{\phi})} \right] = \mc{L}_{\theta, \phi}(x) \end{aligned} \]

Encoder or Recognition or Inference Model \[ \begin{aligned} (\bm{\mu}, \log \bm{\sigma}) &= \operatorname{EncoderNeuralNet}_\phi(\bm{x}) \\ q_\phi(\bm{z} \mid \bm{x}) &= \mc{N}(\bm{z}; \bm{\mu}, \operatorname{diag}{(\bm{\sigma})}). \end{aligned} \]
Decoder or Generative Model (Binary Data) \[ \begin{aligned} \bm{p} &= \operatorname{DecoderNeuralNet_\theta(\bm{z})} \\ \log p_\theta(\bm{x} \mid \bm{z}) &= \sum_{j=1}^D \log p(x_j \mid \bm{z}) = \sum_{j=1}^D \operatorname{Bernoulli(x_j; p_j)} \\ &= \sum_{j=1}^D \left[ x_j \log p_j + (1-x_j) \log(1-p_j) \right] \end{aligned} \] where \(\forall p_j \in \bm{p}; 0 \leq p_j \leq 1\) (e.g. implemented through a sigmoid nonlinearity as the last layer of the \(\operatorname{DecoderNeuralNet}_\theta(\cdot)\)), where \(D\) is the dimensionality of \(\bm{x}\), and \(\operatorname{Bernoulli}(\cdot; p)\) is the probability mass function of the Bernoulli distribution.
Since we the log-likelihood is intractable to compute, we cannot perform the optimization in Equation 1. Instead, we will maximize the ELBO \(\mc{L}_{\theta, \phi}(x)\) with respect to both the decoder and encoder \((\bm{\theta}, \bm{\phi})\) as a proxy.

How to maximize ELBO?
Unbiased gradients of the ELBO with respect to the generative model parameters \(\bm{\theta}\) are simple to obtain: \[ \begin{aligned} \nabla_\theta \mc{L}_{\theta, \phi}(x) &= \nabla_\theta \E_{q_\phi(\bm{z} \mid \bm{x})} \left[\log p_\theta(\bm{x}, \bm{z}) - \log q_\phi(\bm{z} \mid \bm{x}) \right] \\ &= \E_{q_\phi(\bm{z} \mid \bm{x})} \left[\nabla_\theta\left( \log p_\theta(\bm{x}, \bm{z}) - \log q_\phi(\bm{z} \mid \bm{x}) \right) \right] \\ &\simeq \nabla_\theta\left( \log p_\theta(\bm{x}, \bm{z}) - \log q_\phi(\bm{z} \mid \bm{x}) \right) \\ &= \nabla_\theta \log p_\theta(\bm{x}, \bm{z}). \end{aligned} \] The last line is a simple Monte Carlo estimator of the second line, where \(\bm{z}\) in the last two lines is a random sample from \(q_\phi(\bm{z} \mid \bm{x})\).
Unbiased gradients with respect to the variational parmaeters \(\bm{\phi}\) are more difficult to obtain.
- ELBO’s expectation is taken with respect to the distribution \(q_\phi(\bm{z} \mid \bm{x})\).
- This is a function of \(\bm{\phi}\)!
\[ \begin{aligned} \nabla_\phi \mc{L}_{\theta, \phi}(\bm{x}) &= \nabla_\phi \E_{q_\phi(\bm{z} \mid \bm{x})} \left[\log p_\theta(\bm{x}, \bm{z}) - \log q_\phi(\bm{z} \mid \bm{x}) \right] \\ &\neq \E_{q_\phi(\bm{z} \mid \bm{x})} \left[\nabla_\phi \left( \log p_\theta(\bm{x}, \bm{z}) - \log q_\phi(\bm{z} \mid \bm{x}) \right) \right] \end{aligned} \]
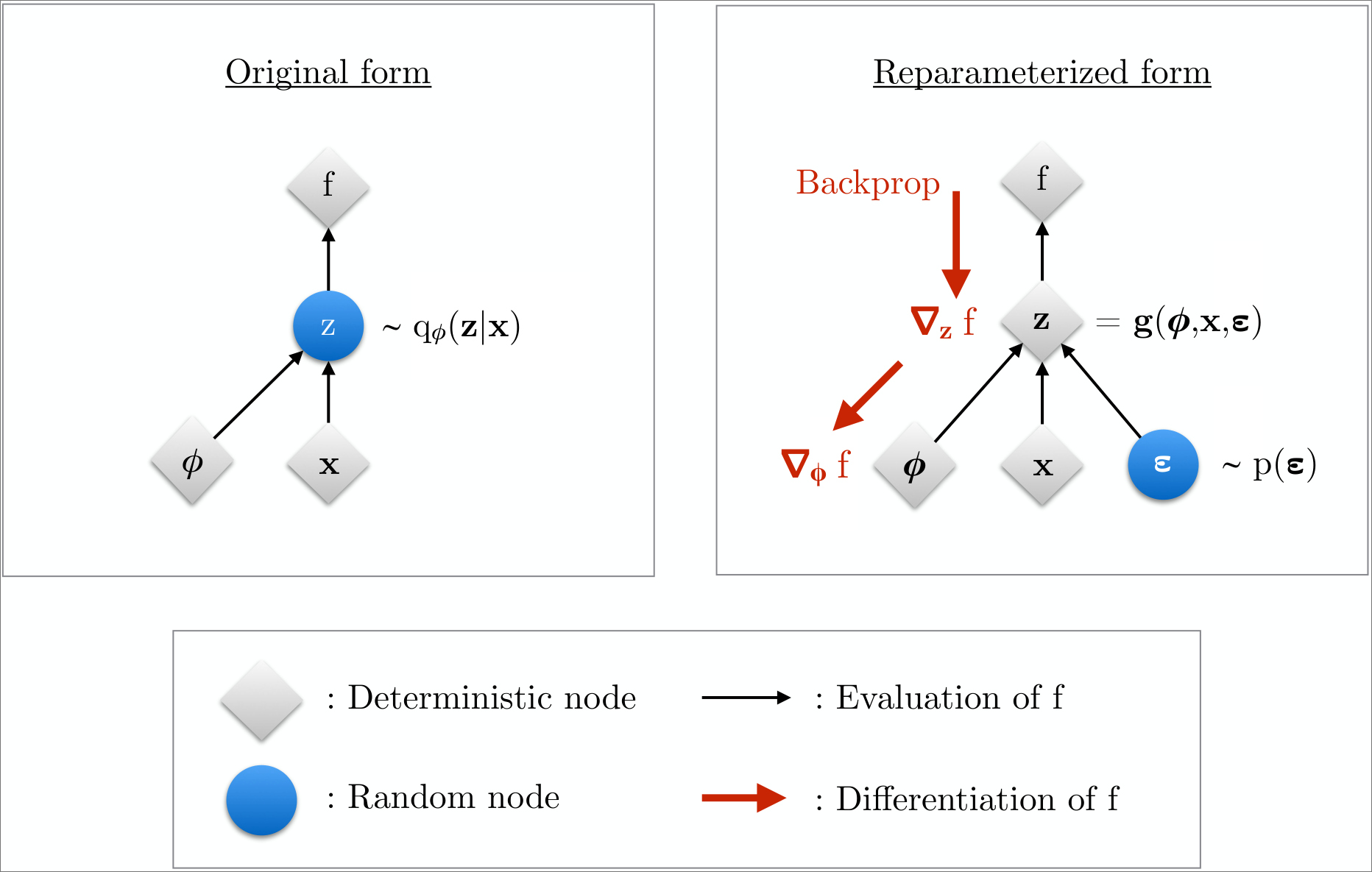
For continuous latent variables and a differentiable encoder and generative model, the ELBO can be straightforwardly differentiated with respect to both \(\bm{\phi}\) and \(\bm{\theta}\) through a change of variables, also called the reparametrization trick.
- Express the random variable \(\bm{z} \sim q_\phi(\bm{z} \mid \bm{x})\) as some differentiable (and invertible) transformation.
- This is a function of another random variable \(\bm{\varepsilon}\), given \(\bm{z}\) and \(\bm{\phi}\): \[ \bm{z} = \bm{h}(\bm{\varepsilon}, \bm{\phi}, \bm{x}) \]
- The random variable \(\bm{\varepsilon}\) is independent of \(\bm{x}\) or \(\bm{\phi}\).
- Now, the expectations can be rewritten in terms of \(\bm{\varepsilon}\): \[ \E_{q_\phi(\bm{z} \mid \bm{x})}[f(\bm{z})] = \E_{p(\bm{\varepsilon})}[f(\bm{z})]. \]
- This makes the expectation and gradient operators commutative, and we can form a simple Monte Carlo estimator: \[ \begin{aligned} \nabla_\phi \E_{q_\phi(\bm{z} \mid \bm{x})}[f(\bm{z})] &= \nabla_\phi \E_{p(\bm{\varepsilon})}[f(\bm{z})] \\ &= \E_{p(\bm{\varepsilon})}[\nabla_\phi f(\bm{z})] \\ &\simeq \nabla_\phi f(\bm{z}) \end{aligned} \] where in the last line, \(\bm{z} = h(\bm{\varepsilon}, \bm{\phi}, \bm{x})\) with random noise sample \(\bm{\varepsilon} \sim p(\bm{\varepsilon})\).
Under the reparametrization, we can replace an expectation with respect to \(q_\phi(\bm{z} \mid \bm{x})\) with one with respect to \(p(\bm{\varepsilon})\).
- Now, the ELBO can be written as \[ \begin{aligned} \mc{L}_{\theta, \phi}(\bm{x}) &= \E_{q_\phi(\bm{z} \mid \bm{x})} \left[ \log p_\theta(\bm{x}, \bm{z}) - \log q_\phi(\bm{z} \mid \bm{x}) \right] \\ &= \E_{p(\bm{\varepsilon})} \left[ \log p_\theta(\bm{x}, \bm{z}) - \log q_\phi(\bm{z} \mid \bm{x}) \right], \end{aligned} \] where \(\bm{z} = \bm{h}(\bm{\varepsilon}, \bm{\phi}, \bm{x})\).
As a result, we can form a simple Monte Carlo estimator \(\tilde{\mc{L}}_{\theta, \phi}(\bm{x})\): \[ \begin{aligned} \bm{\varepsilon} &\sim p(\bm{\varepsilon}) \\ \bm{z} &= \bm{h}(\bm{\varepsilon}, \bm{\phi}, \bm{x}) \\ \tilde{\mc{L}}_{\theta, \phi}(\bm{x}) &= \log p_\theta(\bm{x}, \bm{z}) - \log q_\phi(\bm{z} \mid \bm{x}) \end{aligned} \]
The resulting gradient \(\nabla_\phi \tilde{\mc{L}}_{\theta, \phi}(\bm{x})\) is used to optimize the ELBO using minibatch SGD.


Both the encoder and the decoder give rise to a joint distribution over both \(x\) and the latent \(z\), that is, \[ \begin{aligned} q_\phi(x, z) &= p_{\text{data}}(x) q_\phi(z \mid x) \\ p_\theta(x, z) &= p_\theta(x \mid z) p_{\text{prior}}(z) \end{aligned} \]
Conceptualize training the VAE as learning \(\phi\) and \(\theta\) so that the encoder and decoder joint distributions are reasonably similar.
- Do this via minimizing the KL-divergence of the joint latent and data distributions: \[ \begin{aligned} D_{\text{KL}}\left(q_\phi(x, z)\, \|\, p_\theta(x, z)\right) &= D_{\text{KL}}\left( p_{\text{data}}(x) q_\phi(z \mid x)\, \|\, p_\theta(x \mid z) p_{\text{prior}}(z) \right) \\ &= \E_\blacksquare \left[ \log \left( \frac{p_{\text{data}}(x) q_\phi(z \mid x)}{p_\theta(x \mid z) p_{\text{prior}}(z)} \right) \right] \\ &= \textcolor{#1f77b4}{\E_\blacksquare\left[\log p_{\text{data}}(x)\right]} + \textcolor{#ff7f0e}{\E_\blacksquare\left[\log \frac{q_\phi(z \mid x)}{p_{\text{prior}}(z)}\right]} - \textcolor{#2ca02c}{\E_\blacksquare\left[\log p_\theta(x \mid z)\right]} \\ \blacksquare &= x \sim p_{\text{data}}(x), \, z \sim q_\phi(z \mid x) \end{aligned} \]
Analyze the first term: \[ \textcolor{#1f77b4}{\E_\blacksquare\left[\log p_{\text{data}}(x)\right] = \E_{x \sim p_{\text{data}}(x)}[\log p_{\text{data}}(x)] = C, } \] for some constant \(C\) independent of \(\phi\) and \(\theta\).
Analyze the second term: \[ \textcolor{#ff7f0e}{\E_\blacksquare\left[\log \frac{q_\phi(z \mid x)}{p_{\text{prior}}(z)}\right] = \E_{x \sim p_{\text{data}}(x)} \left[ D_{\text{KL}}(q_\phi(z \mid x)\, \|\, p_{\text{prior}}(z)) \right] } \] encourages \(q_\phi(z \mid x)\) to resemble the prior \(p_{\text{prior}}(z)\).
Analyze the third term: \[ -\textcolor{#2ca02c}{\E_\blacksquare\left[\log p_\theta(x \mid z)\right] = -\E_{x \sim p_{\text{data}}(x), z \sim q_\phi(z \mid x)}[\log p_\theta(x \mid z)] } \] corresponds to the average negative log-likelihood, and thus serves to minimize the reconstruction loss.
Ignoring the constant term, we combine the and terms to obtain that the VAE loss is actually simply the KL-divergence in joint data and latent space: \[ \begin{aligned} \mc{L}_{\text{VAE}}(\theta, \phi) &= \underbrace{\textcolor{#ff7f0e}{\E_{x \sim p_{\text{data}}(x)} \left[ D_{\text{KL}}(q_\phi(z \mid x)\, \|\, p_{\text{prior}}(z)) \right]}}_{\text{prior enforcement loss}} - \underbrace{\textcolor{#2ca02c}{\E_{x \sim p_{\text{data}}(x), z \sim q_\phi(z \mid x)}[\log p_\theta(x \mid z)]}}_{\text{reconstruction loss}} \\ &= D_{\text{KL}}\left(q_\phi(x, z)\, \|\, p_\theta(x, z)\right) + \text{const} \end{aligned} \] Therefore, we can interpret the VAE as a KL-divergence in the joint space of latents and images.
VAEs as generative models
Another interpretation of VAEs is as a generative model.
- We can generate a sample by setting \(z \sim p_{\text{prior}}(z) = \mathcal{N}(0, I)\) and sampling \(x \sim p_\theta(\cdot \mid z)\) from the decoder.
- The distribution that we would get is given by \[ p_\theta(x) = \int p_\theta(x \mid z) p_{\text{prior}}(z) dz. \]
Proposition 1 (Chain rule) Let \(q(x, z)\), \(p(x, z)\) be distributions over two variables \(x \in \R^{l_1}\), \(\R^{l_2}\). Then, it holds that \[ D_{\text{KL}}(q(x, z)\, \|\, p(x, z)) = \E_{x \sim q(x)} \left[ D_{\text{KL}}(q(z \mid x)\, \|\, p(z \mid x)) \right] + D_{\text{KL}}(q(x)\, \|\, p(x)). \] In particular, as the second summand is nonnegative, we obtain the data-processing inequality \[ D_{\text{KL}}(q(x)\, \| \, p(x)) \le D_{\text{KL}}(q(x, z)\, \|\, p(x, z)). \]
Proof. \[ \begin{aligned} D_{\text{KL}}\left(q(x, z) \,\|\, p(x, z)\right) &= \E_{(x, z) \sim q(x, z)} \left[ \log \frac{q(x, z)}{p(x, z)} \right] \\ &= \E_{(x, z) \sim q(x, z)} \left[ \log \frac{q(x) q(z \mid x)}{p(x) p(z \mid x)} \right] \\ &= \E_{x \sim q(x)} \left[ \log \frac{q(x)}{p(x)}\right] + \E_{(x, z) \sim q(x, z)} \left[ \log \frac{q(z \mid x)}{p(z \mid x)} \right] \\ &= D_{\text{KL}}(q(x) \,\|\, p(x)) + \E_{x \sim q(x)} \left[ D_{\text{KL}}(q(z \mid x) \,\|\, p(z \mid x)) \right] \end{aligned} \] where we have repeatedly applied the definition of KL-divergence. \(\square\)
By Proposition 1, we can now show that \[ \mc{L}_{\text{VAE}}(\phi, \theta) = D_{\text{KL}}\left( q_\phi(x, z) \,\|\, p_\theta(x, z) \right) + \text{const} \ge D_{\text{KL}}(p_{\text{data}}(x) \,\|\, p_\theta(x)) + \text{const}. \tag{5}\] where we used the fact that the \(x\)-marginal of \(q_\phi(x, z)\) is \(p_{\text{data}}(x)\).
- In other words, the VAE loss inimizes an upper bound on the KL-divergence between the data distribution \(p_{\text{data}}\) and the distribution \(p_\theta(x)\) generated by the VAE.
- Hence, we can look at VAEs as generative models in their own right.
- In the same way, we can show that \[ \mc{L}_{\text{VAE}}(\phi, \theta) = D_{\text{KL}}\left( q_\phi(x, z) \,\|\, p_\theta(x, z) \right) + \text{const} \ge D_{\text{KL}}(q_\phi(z) \,\|\, p_{\text{prior}}(z)) + \text{const}. \tag{6}\] In other words, the VAE objective minimize an upper bound on the KL-divergence between the latent distribution and the prior.
Why not stop at VAEs?
VAEs can be realized as generative models in their own right
- Encoder facilitates the training of a complementary decoder.
- Decoder transforms a Gaussian into the desired distribution
- Samples can be obtained by sampling \(z \sim p_{\text{prior}}(z)\) and then \(x \sim p_\theta(\cdot \mid z)\).
Why then do we need other models, such as diffusion models?
The answer has to do with the so-called amortization gap between the left and right-hand sides of both Equation 5 and Equation 6.
- This gap is zero if and only if \(q_\phi(z \mid x) = p_\theta(z \mid x)\), in which case the encoder represents the true posterior.
- While \(D_{\text{KL}}(q_\phi(x, z) \,\|\, p_\theta(x, z))\) is minimized implies \(D_{\text{KL}}(q_\phi(z) \,\|\, p_{\text{prior}}(z))\) is minimized (see Equation 6), a decrease in the former does not necessarily imply an equal decrease in the latter.
- Consequently, at the end of training, it is simultaneously true that both \(D_{\text{KL}}(q_\phi(x, z) \,\|\, p_\theta(x, z))\) and the amortization gap \[ D_{\text{KL}}(q_\phi(x, z) \,\|\, p_\theta(x, z)) - D_{\text{KL}}(q_\phi(z) \,\|\, p_{\text{prior}}(z)) \] are not completely minimized, so that \(q_\phi(z) \ne p_{\text{prior}}(z)\) and \(p_\theta(x) \ne p_{\text{data}}(x)\).
Finally, observe that during training, the decoder learns to reconstruct from \(q_\phi(z)\) rather than \(p_{\text{prior}}(z)\).
- Hence, switching to reconstruction from \(p_{\text{prior}}(z)\) during inference would amount to going out of distribution from training.
- In practice, however, this is a feature, rather than a bug.
- Practice has shown flow and diffusion models to be more capable models, in general, than the convolutional stacks used to implement the VAE decoder.